MultiSense is 3D perception system designed for mobile robots. It features:
- 2MP monochrome or color imagers.
- 15 million points of 3D data per second. Up to 30 frames per second.
- Reconfigurable resolution, disparity search range, confidence threshold, & exposure controls.
- Gigabit Ethernet. 8 watts. MEMs IMU.
- IP-67 rating. MIL-STD-810G. -40C to 60C.
- SL variant adds time-correlated and calibrated 3D laser.
- Version with 7cm and 21cm baselines.
- IR pattern projector option for low-texture environments.
My role included:
- Product Management, including definition of product features and specifications.
- Program Management for all hardware variants (SL, S7, S21) and software development effort (including FPGA logic, firmware, & OS drivers).
- Mechanical and system design of SL & S7 variants.
- Product marketing efforts.
- Product support tools and processes.
- Training and support of DARPA DRC teams.
- Development of custom data pipelines for key partners.
MultiSense was featured by Xilinx as part of their Powered by Xilinx Series.
I've given talks about 3D sensor development and testing at the Embedded Vision Summit and ROSCON.

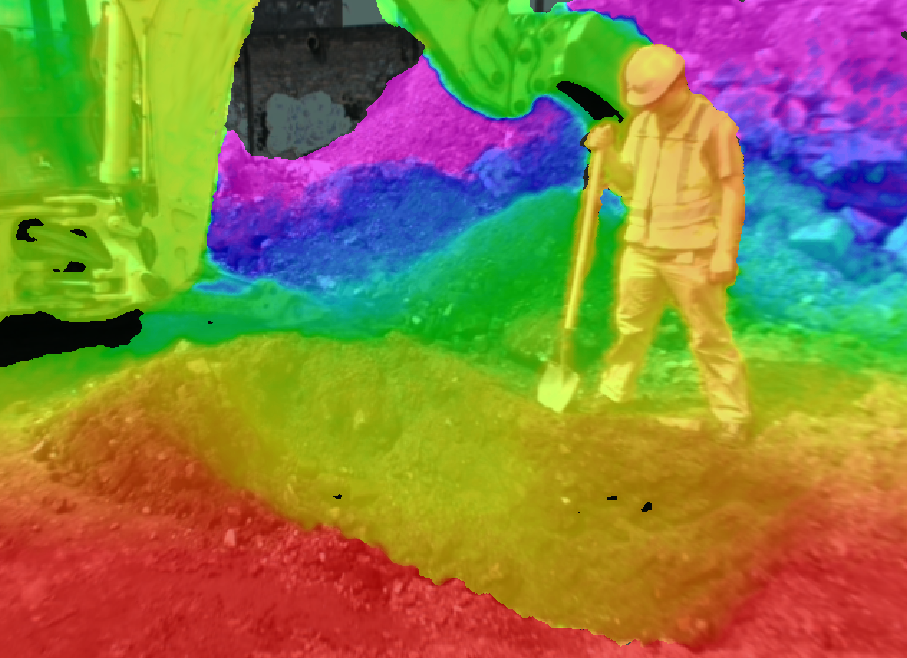
Depth information visualized as false color on top the left image
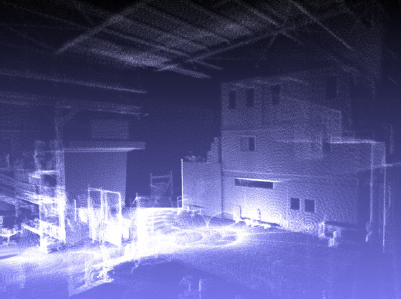
Point cloud of an industrial high-bay built from laser data and visual-inertial path data

SL on a iRobot Packbot for tunnel mapping. Mine Vision Systems is commercializing this use of the SL.
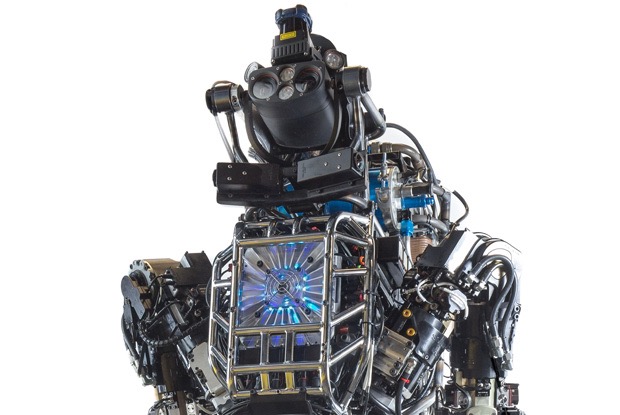
Boston Dynamics selected the MultiSense SL for the Atlas Robots entered into DARPA's Robotic Challange
2D and 3D data from MIT's SL during the DARPA DRC Finals.
MultiSense 3D data used for localization, footstep planning, and grasp planning.
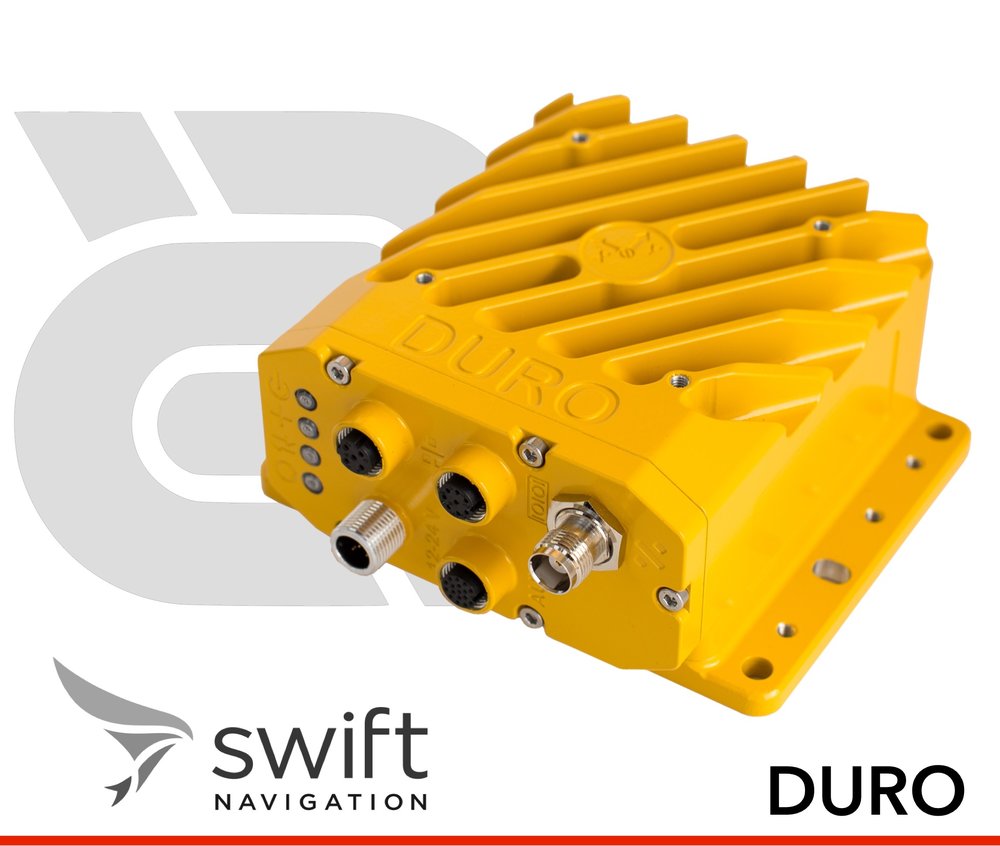
DURO is a jointly developed product between Carnegie Robotics and Swift Navigation. It is a rugged Real-Time Kinematic (RTK) GNSS position sensor based around Swift's Piksi Multi module. DURO features:
- Connectors that expose all communications interfaces (Ethernet, CAN, Serial), other IO (PPS, Trigger, Encoder), and aux power outputs.
- An efficient conductive-cooling path between the internal FPGA and the ambient environment.
- IP-67 rated and designed for high shock and vibration environments.
My role included:
- Initiating and signing the Joint Development Agreement with Swift Navigation.
- Definition of product features and specifications.
- Program Management of the development and testing effort.
- Initial mechanical & industrial design.
Carnegie Robotics developed this commercial and industrial floor cleaner for Nilfisk. The system:
- Can replicate trained paths or automatically fill-in trained areas.
- Generates and manages its' own maps and navigation.
- Can still be operated as a normal (non-autonomous) floor cleaner.
- Detects overhanging obstacles and drop-offs. It is safety certified.
My role included:
- Early concept sensor and system prototyping
- Technical architecture and program planning

SREHD is a semi-autonomous mine and IED detection robot that Carnegie Robotics built for the US Army. The system includes marking and neutralization capabilities.
My role on the SREHD program spanned two R&D contracts and an Engineering and Manufacturing Design (EMD) contract, and included:
- Developing two generations of the robots' custom sweeping manipulator
- Operating systems during developmental and performance testing
- Technical lead on the integration of and upgrades to the metal detector & ground penetrating radar (GPR) sensor.
More information can be found in the following articles:

SREHD system during developmental testing.
Image approved for public release by the US Army: Distribution Unlimited.
Badger is a derivative of NREC's Mini-Crusher robot. The robot features:
- Six wheel drive with in-wheel brushless motors and independent suspensions
- Top speed of 6.7 m/s (15 mph)
- Capable of climbing 8" steps and 40 degree slopes
- 55 kg system weight & 45 kg payload capacity
- Front and rear accessible battery packs
- Gigabit Ethernet & 48v, 24v, 12v power distribution to payload modules
- Flexible, top-inserted payload bay system
- Optional cameras and lights embedded into front and rear bumpers
My role included:
- Technical information transfer from NREC
- Definition of system features and specifications
- System and mechanical design
- Management of electrical and software development efforts
- Demonstration of the system as a rapid IED response platform

Solo was the industry's first autonomous inspection robot. It collects spherical video in 8" thru 12" residential sewer pipes and is entirely self-contained. The robot includes:
- Fisheye cameras & ring lights.
- Distance sensors to detect when it has reached the next manhole.
- Self-clearing track system.
- 400 feet of high-strength tether with level-wind mechanism -- used to associate video data with position within the pipe.
- High force & continuous winch, which can engage with the tether for self-extraction if the track system jams.
- Storage for several days of collected video and replaceable batteries.
- WIFI communications to an operator interface for pipe metadata entry.
My role included:
- System Engineer for Solo
- Product Manager once development was completely
- Mechanical design of the lower half of the robot
- Lead Software Engineer on the offline detect-coding and reporting system
- Point of Contact with our manufacturing partner


Solo being lowered into a residential sewer

Solo starting an inspection

Testing the grit-resistance of the track system

Batteries about to be installed
Responder is a remotely-operated robot designed to inspect large sewer pipes. It features:
- Onboard hydraulic power unit (HPU). Hydraulicly powered tracks, mast, & yoke.
- Support for CCTV cameras, IMU, 3D Laser, fisheye cameras, and profiling sonar.
- Operating depth of up to 100 feet underwater.
- Two miles of tether between the robot and operating truck. The tether contains strength members, 1200 volts AC for the HPU, 400 volts DC for onboard computers and sensors, and 4 single-mode fibers for communications.
My role included:
- Development of the 3D laser sensor.
- Design of the proportionally-controlled hydraulic manifold.
- Re-design of the electronics enclosure and selection of internal components.
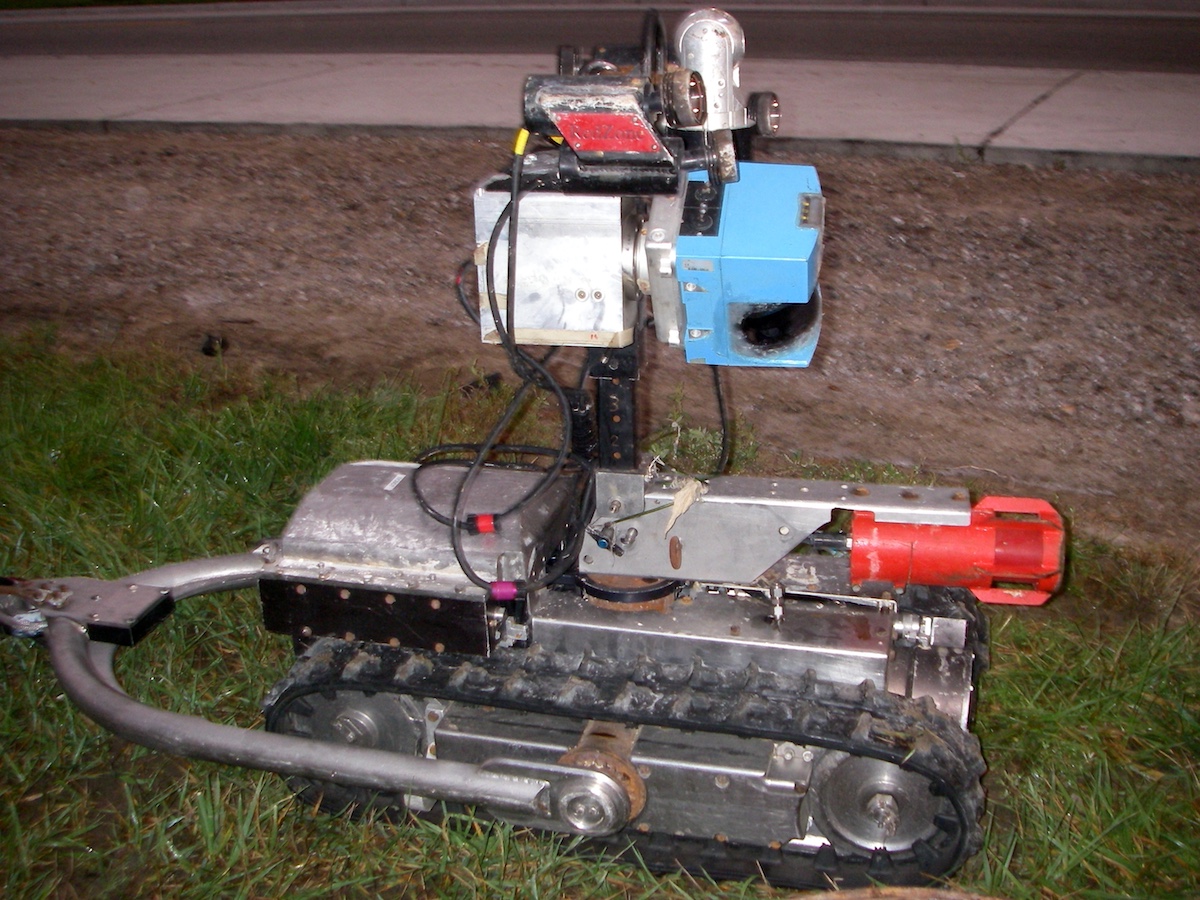
Robot outfitted with 3D laser, PTZ camera, and profiling sonar sensors

Responder being inserted into a sewer through a standard manhole

Responder in 4 feet of flow, 3D laser above the water line will create 3D models of the pipe surface (see below)
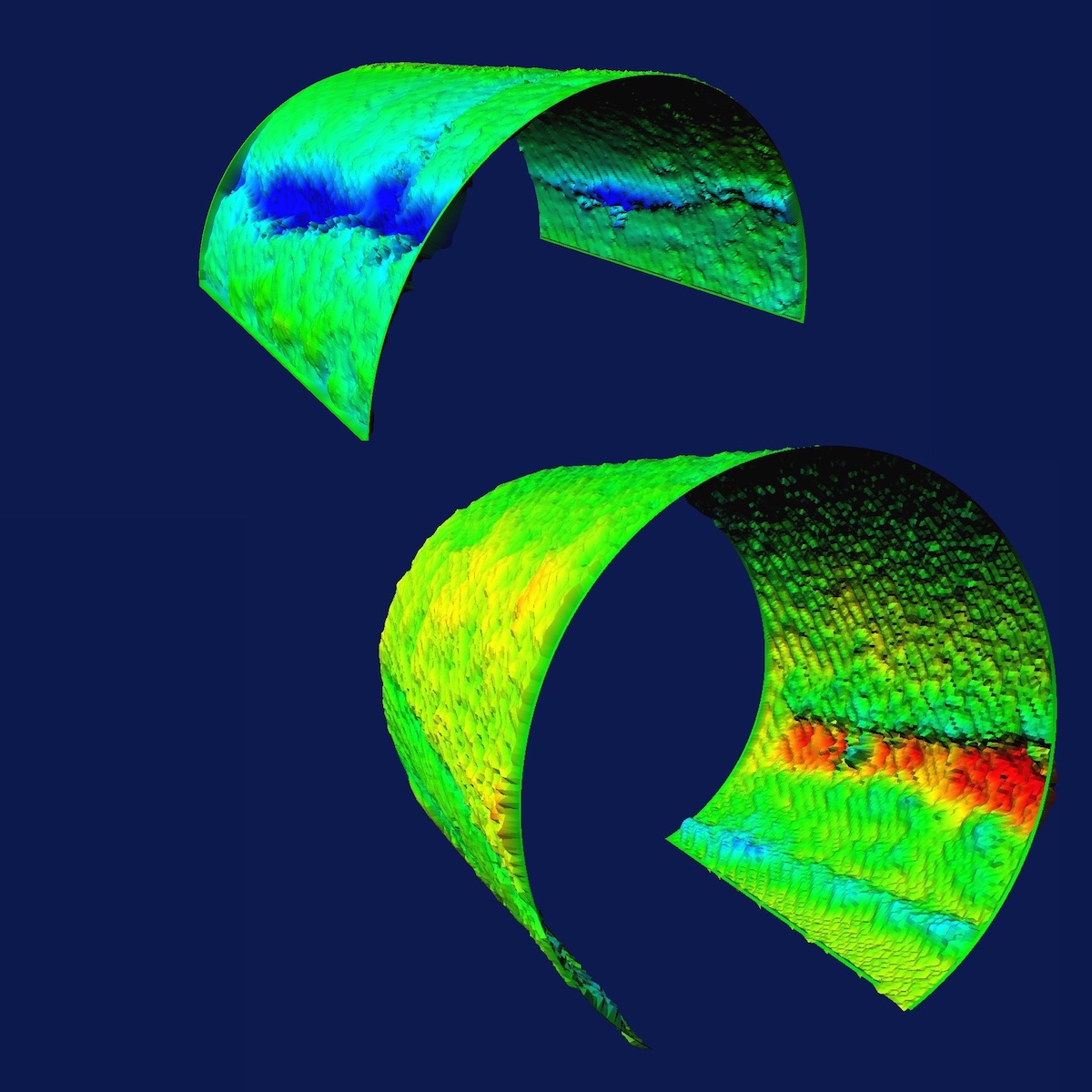
Meshed 3D data from pipe inspection. Blue areas show buildup, red areas show wall corrosion